As the odour of fried electronics dissipates in the air, I’m unexpectedly afforded the opportunity to write this blog post a day or two earlier than… Read
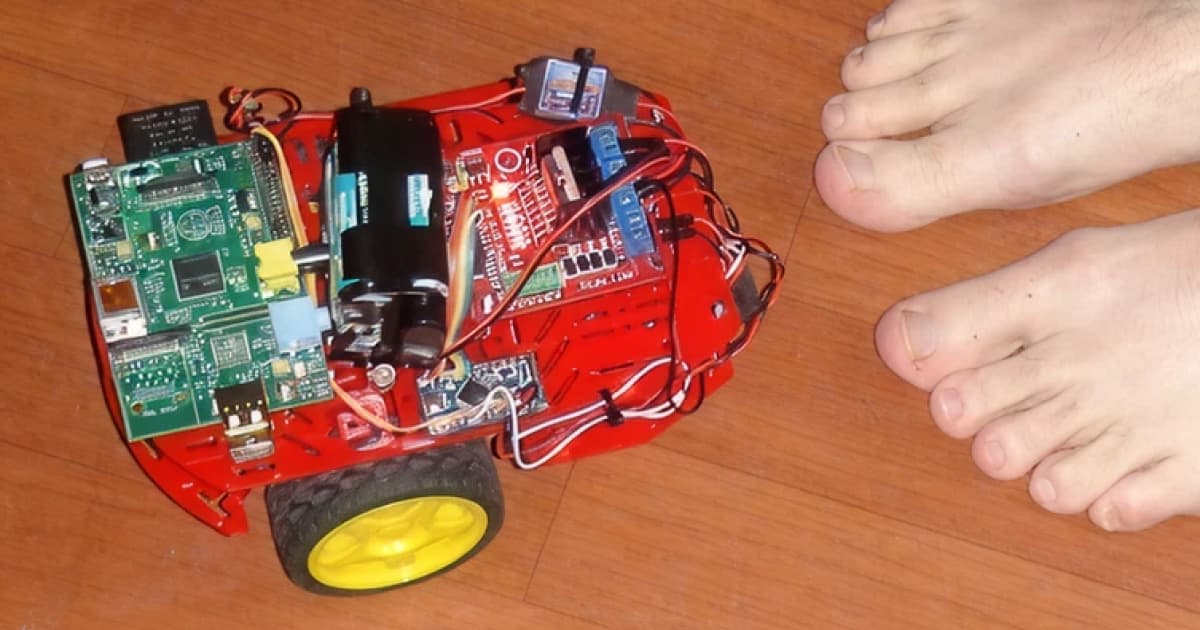
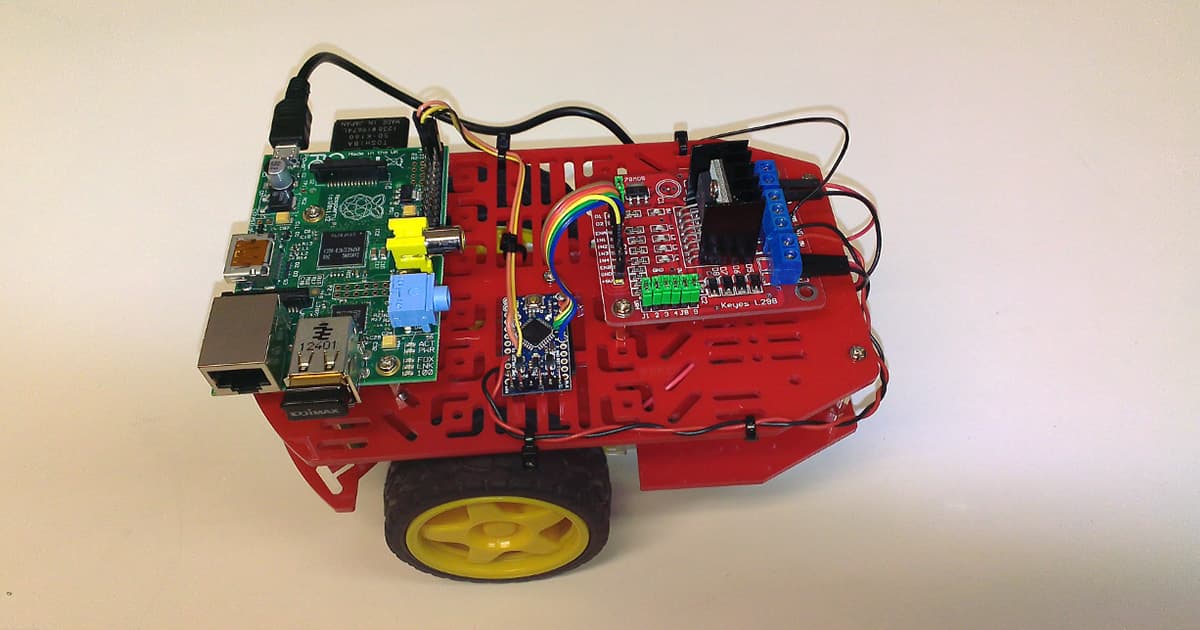
This blog originally started when I took delivery of the DyaBot, a Raspberry Pi and Arduino based variant of the C3Pi running Dyalog v13.2. The architecture… Read
Last week the ‘bots were busy preparing for the J Language Conference in Toronto, where they made their first public appearance together. Upon returning… Read
It is now 3 weeks since we shipped Dyalog version 14.0 and released the new Dyalog web site, so it’s probably time to stop celebrating and get back to… Read
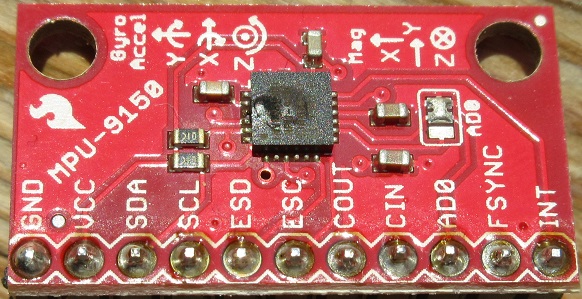
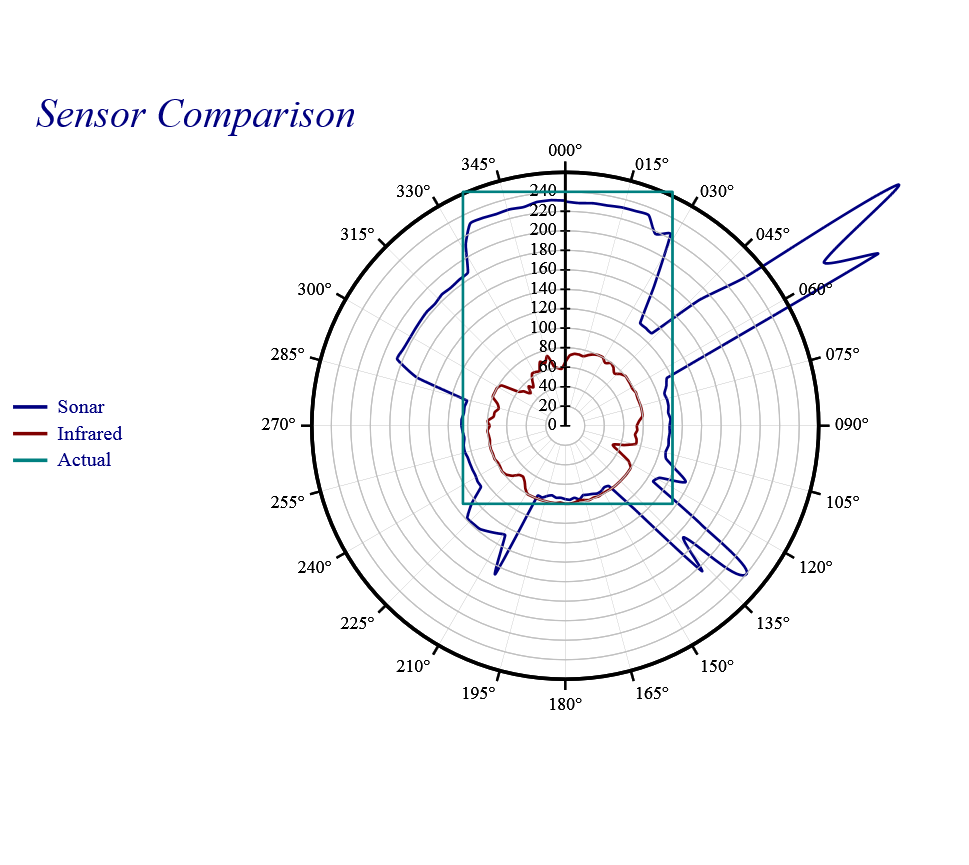
Regular readers will remember my whining about the poor precision of both infra-red and ultrasonic sensors. But today, the Raspberry Pi / Dyalog APL… Read
Of course, it was an illusion that I would be able to get straight back to the robot after vacation, there were a few other jobs waiting like the… Read
It has been more than a month since my last blog post, and you’d be forgiven for thinking that I’d lost interest in robots. It *is* true that I have been… Read
Following the release of Dyalog APL for the Raspberry Pi came a hectic week with no time to play… But now the next sensor has arrived, so it is time to… Read
Although the news had not yet appeared on the Dyalog webpage when this was written, the CTO blog has access to exclusive sources and is therefore able to… Read
As described in a recent post, our robot now has an Infra-Red distance sensor, which allows us to measure the distance from the front of the robot to the… Read
The first time I heard the term Raspberry Pi – in the beginning of 2012 – I immediately went for a plate and a fork – I LOVE Raspberries! Much to my… Read
APL on the C3Pi One of the biggest joys of being the CTO of Dyalog is that you get to write code to help evaluate prototypes of proposed language features, or… Read
Technical advice and assistance on all aspects of Dyalog usage is available by e-mail (support@dyalog.com) and/or telephone (+44 1256 830030 – limited to U.K. office hours). Limited advice on design and coding is available, but is not intended to replace the use of the printed and on-line documentation. Except when reporting an issue with the software, users are encouraged to seek advice from the user community via the Dyalog Forum (reading the content of the forums does not require membership).