Fun with APL on the Raspberry Pi (without a Robot)
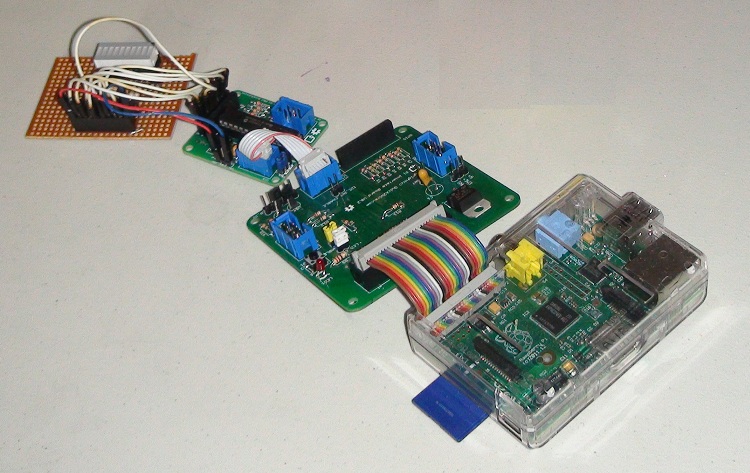
The official release of Dyalog APL for the Raspberry Pi now looks as if it going to happen on Friday! In preparation for this, we have been working on some examples to demonstrate things you can do on your Pi without a set of wheels attached – like making lights blink! [embedplusvideo height=”356″ width=”584″ standard=”http://www.youtube.com/v/ztLIQgszE1s?fs=1″ […]
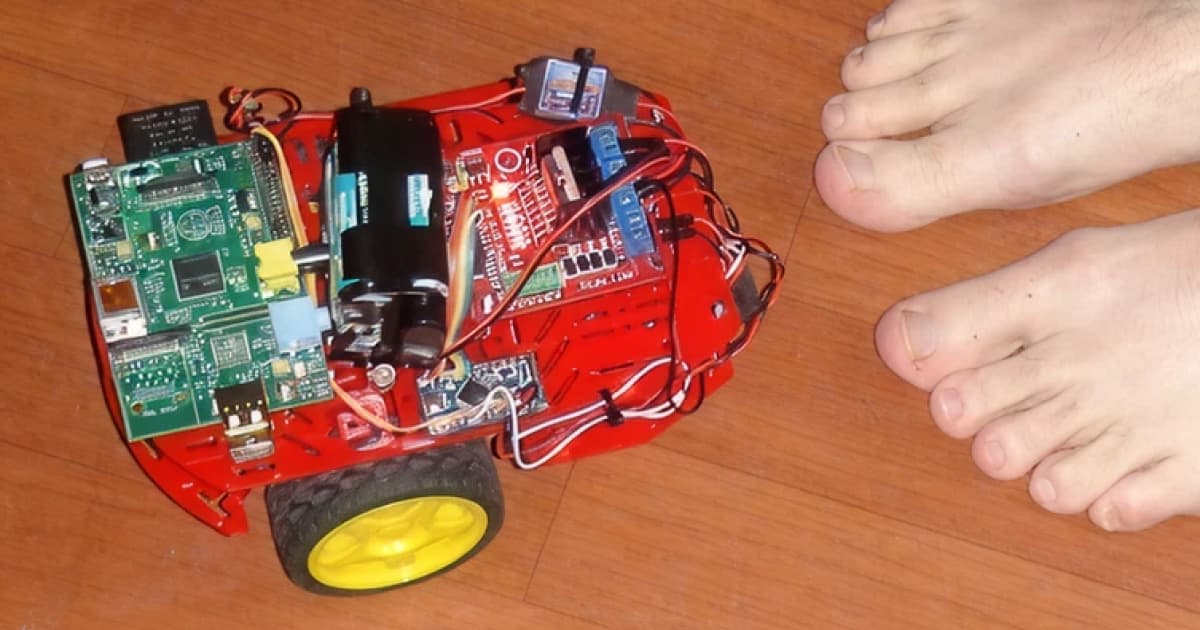
Visualising Sensor Data using APL on the Robot

As described in a recent post, our robot now has an Infra-Red distance sensor, which allows us to measure the distance from the front of the robot to the nearest obstacle. With respect to the autonomous navigation code that we wish to write, this will be the cornerstone! In order to evalute the perfomance of […]
C3Pi Opens Eyes at the APL Moot
This weekend, the Dyalog C3Pi reached the final stop on the European spring tour, attending the British APL Association’s Annual General Meeting and “Moot” just north of London, where the robot met the famous mice from Optima. The day before, the C3Pi also travelled to an OSHUG meeting in London on Thursday, where Romilly Cocking was talking about quick2link. Alas, poor C3Pi was […]
Raspberry Pi – Experimenting with a Robot for Practical Applications
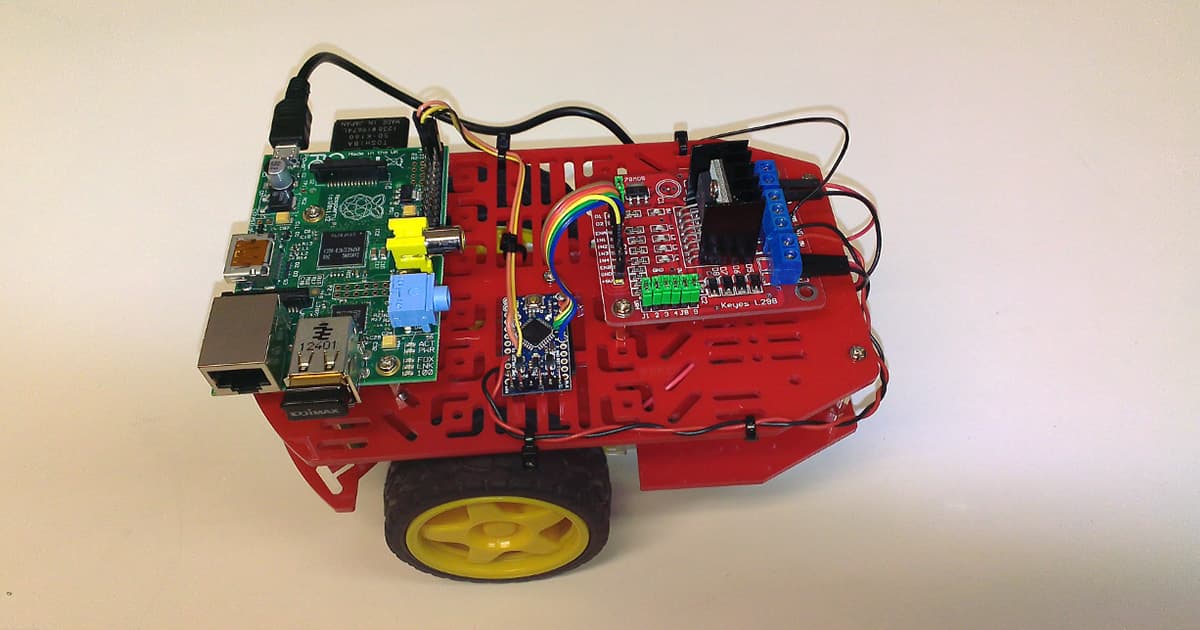
The first time I heard the term Raspberry Pi – in the beginning of 2012 – I immediately went for a plate and a fork – I LOVE Raspberries! Much to my surprise what was served up was not a lovely piece of pie with lots of cream and raspberries, but a small electronics board […]
Driving my Pi

Back from the APL meeting in Hamburg, where my C3Pi made it’s first appearance on German soil (and a few days meeting with APL users in Milan). I’ve extended the control program which was used to make last week’s figure 8 video to give me some “hand controls”. I do appreciate that it is inadvisable for humans to […]







